Trevor Ablett
PhD candidate at University of Toronto in the STARS Lab.
Researching the intersection of machine learning, robotics, and humans.
For a full list of my published work, see my Google Scholar page. I am investigating methods for improving imitation learning algorithms for robotic manipulators, by making them more sample efficient and/or more applicable to the challenges of real robotic tasks.
Tactile Imitation Learning
Learning to Place by Picking
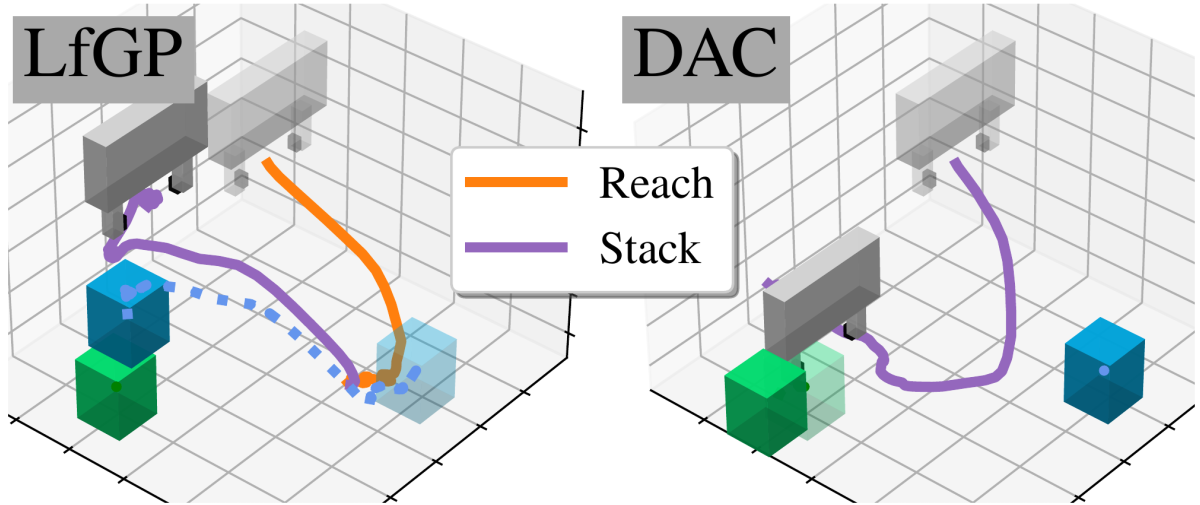
Learning from Guided Play
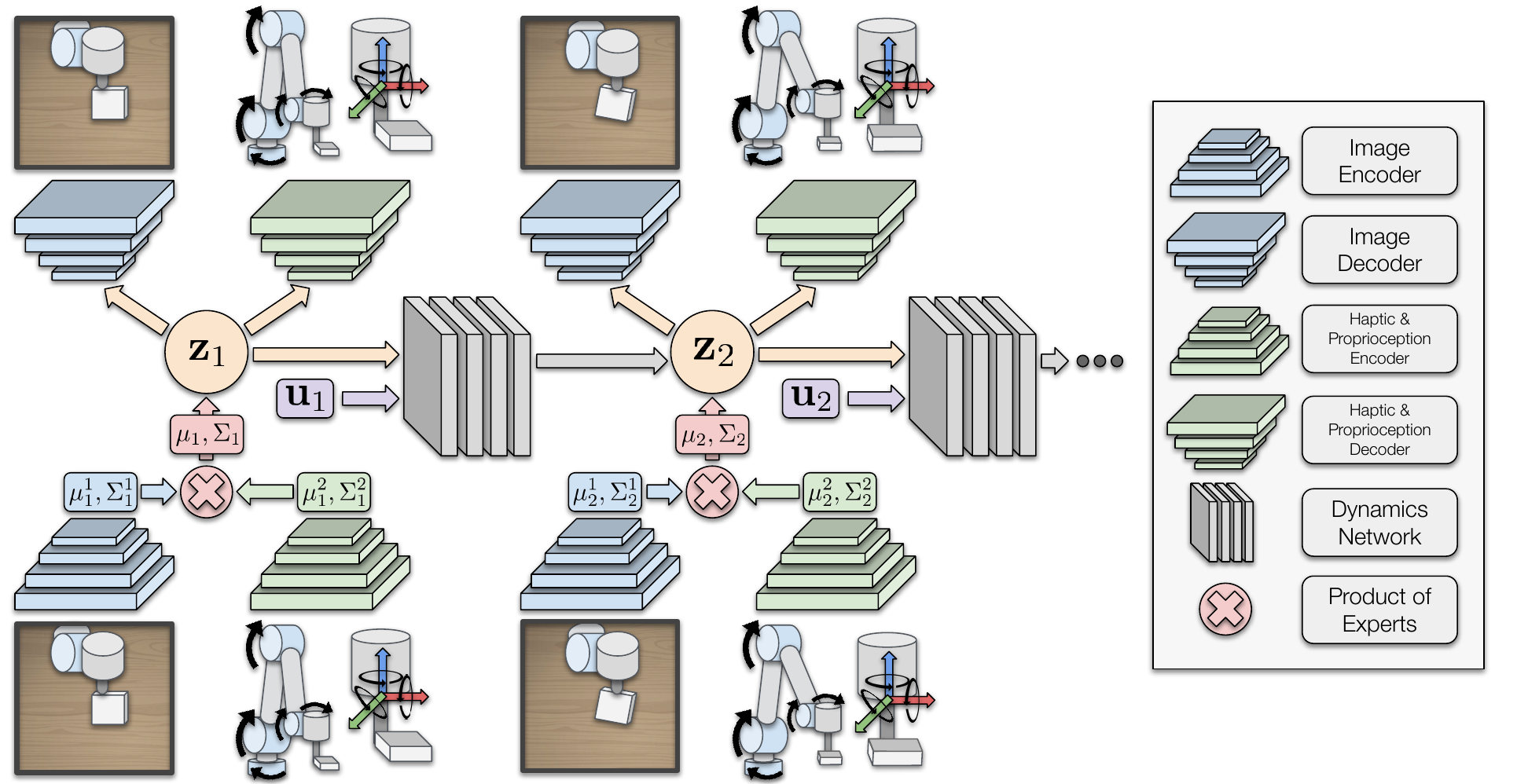
Multimodal Sequential Latent Variable Models
Multiview Manipulation
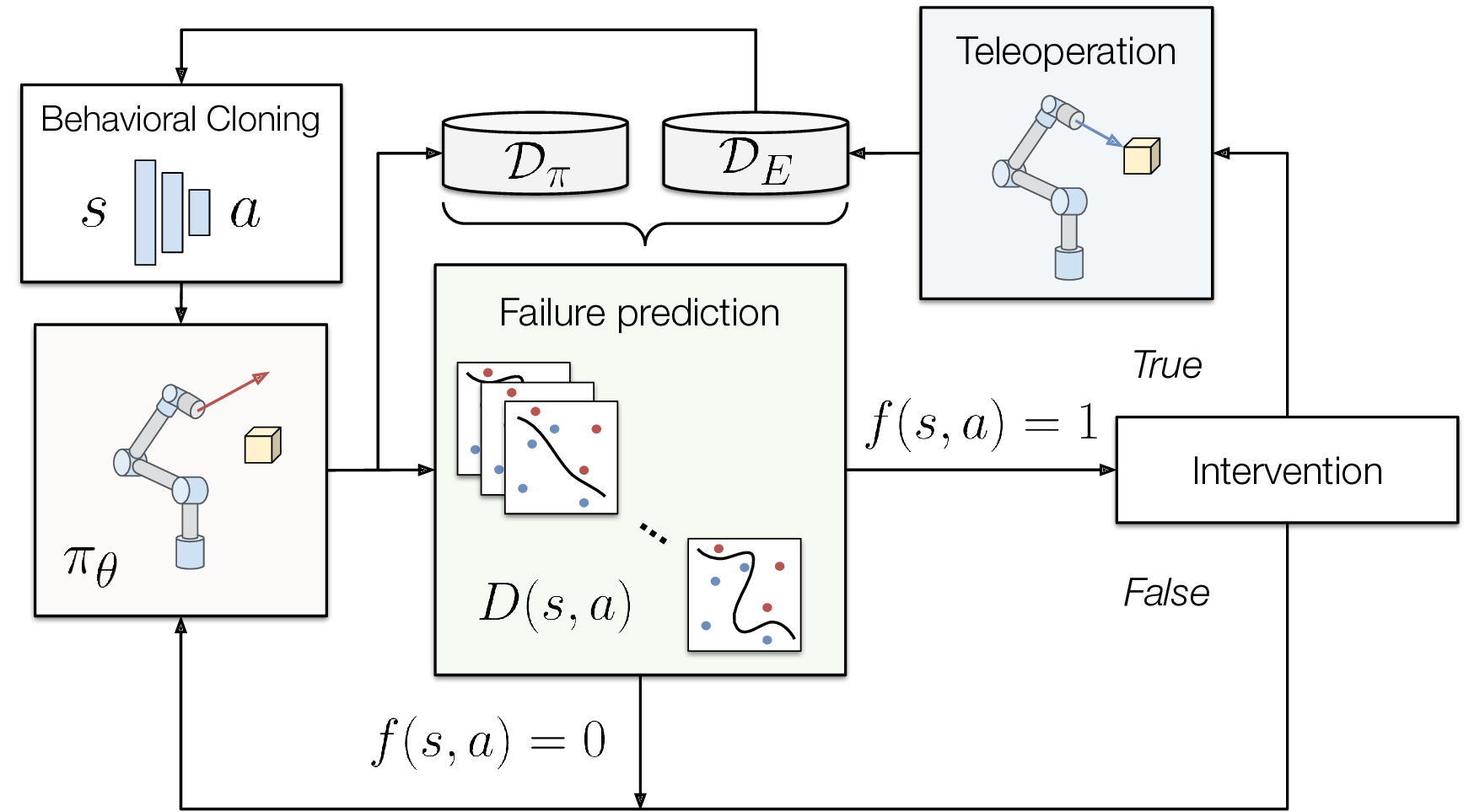
Intervention-based Learning
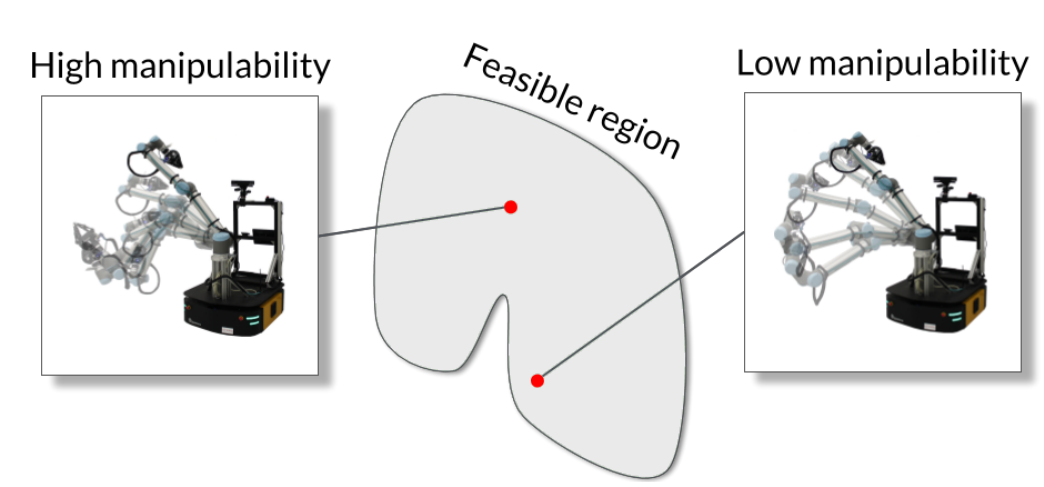
Manipulability Optimization