Trevor Ablett
PhD candidate at University of Toronto in the STARS Lab.
Researching the intersection of machine learning, robotics, and humans.
For a full list of my published work, see my Google Scholar page. I am investigating methods for improving imitation learning algorithms for robotic manipulators, by making them more sample efficient and/or more applicable to the challenges of real robotic tasks.
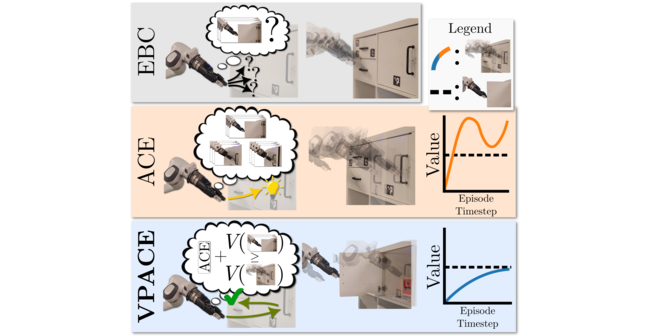
Learning without Rewards or Demonstrations
Tactile Imitation Learning
Learning to Place by Picking
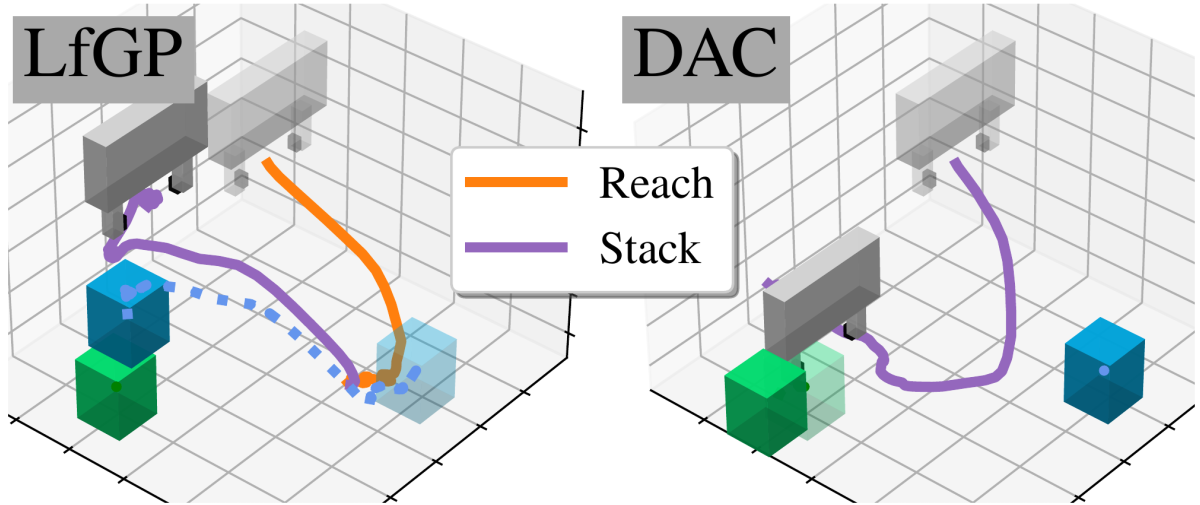
Learning from Guided Play
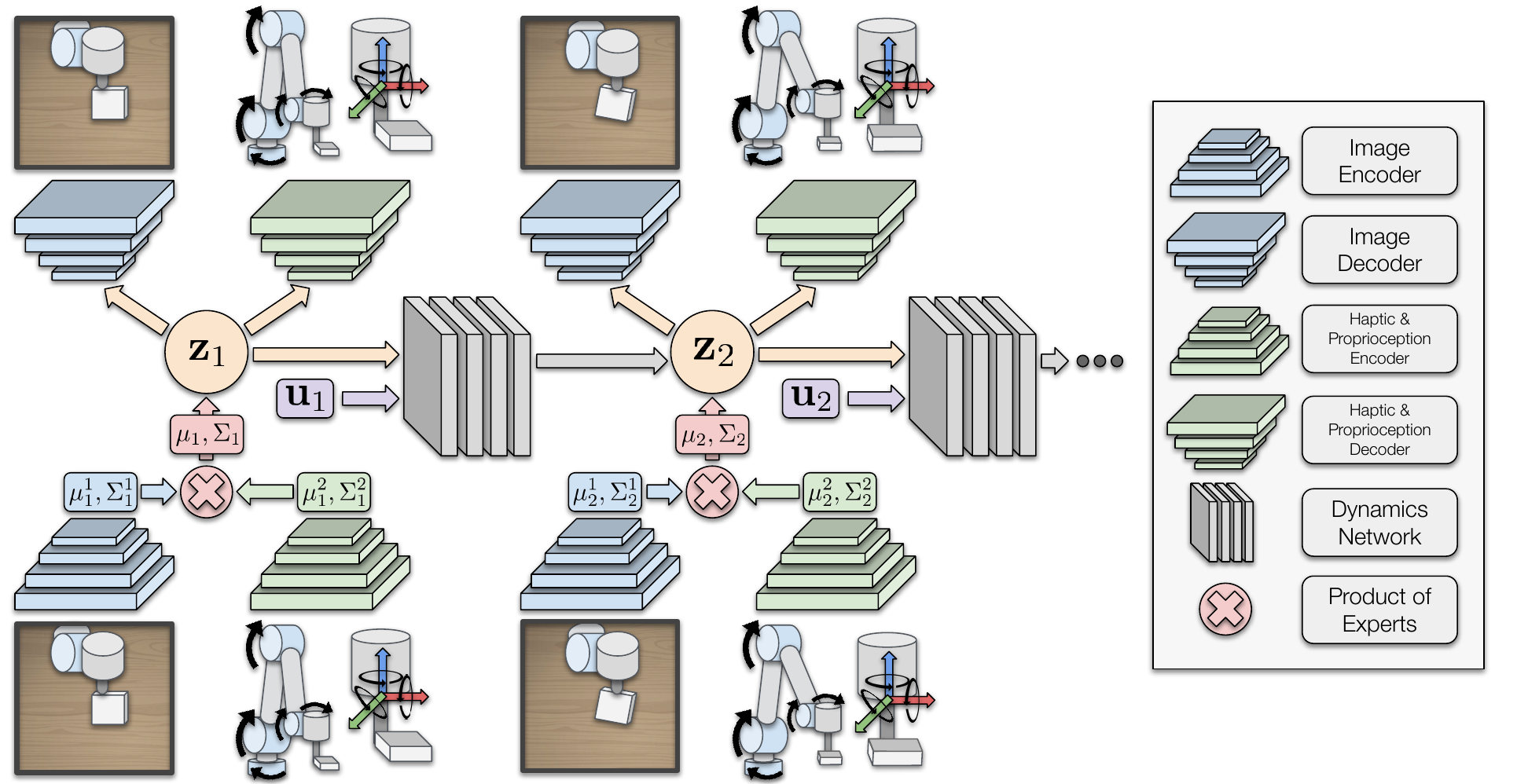
Multimodal Sequential Latent Variable Models
Multiview Manipulation
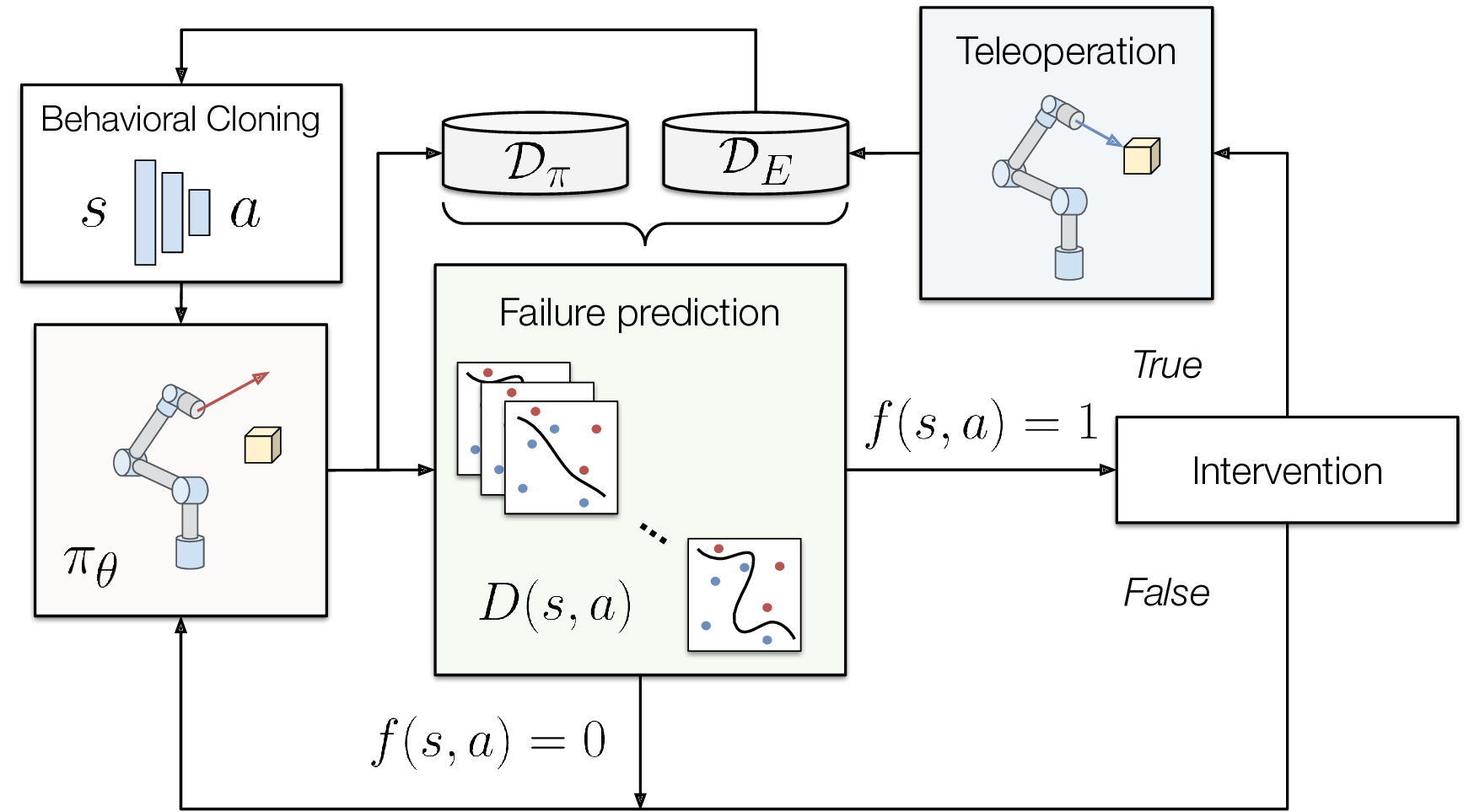
Intervention-based Learning
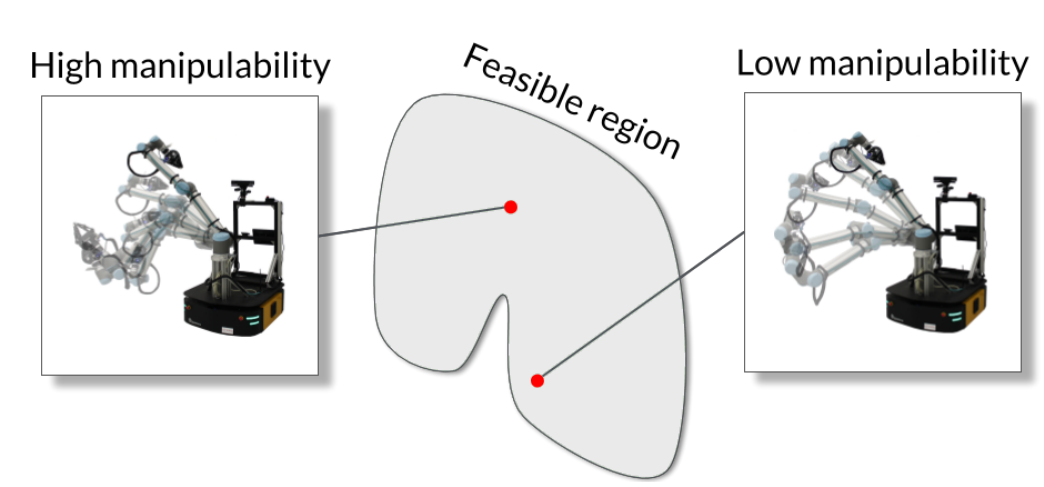
Manipulability Optimization